"人と共存する環境計測ロボットのための経路計画の最適化", 電子情報通信学会CQ研究会, 沖縄
中村俊太、TECHASARNTIKUL NATTAON、大下裕一、下西英之(阪大)
研究会 - 人と共存する環境計測ロボットのための経路計画の最適化
投稿者プロフィール
最新の投稿
 研究業績2026年2月5日"Adaptive path planning with dynamic personal space for environmental measurement robots", IEEE 44th International Conference on Consumer Electronics (ICCE 2026), Dubai, UAE
研究業績2026年2月5日"Adaptive path planning with dynamic personal space for environmental measurement robots", IEEE 44th International Conference on Consumer Electronics (ICCE 2026), Dubai, UAE 研究業績2026年1月23日[奨励講演]"動的環境下でのネットワークスライス埋め込み問題に対する量子遺伝子制御ネットワークを用いた最適化手法の評価", 電子情報通信学会NS研究会, 高知
研究業績2026年1月23日[奨励講演]"動的環境下でのネットワークスライス埋め込み問題に対する量子遺伝子制御ネットワークを用いた最適化手法の評価", 電子情報通信学会NS研究会, 高知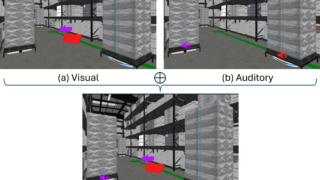 研究業績2025年12月3日"Impact of Visual, Auditory, and Mixed Interfaces on Human-Robot Collaboration in Multi-Robot Environments", ICAT-EGVE 2025, Karlskrona, Sweden
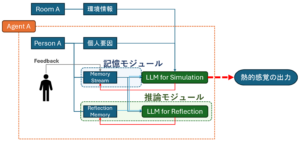
研究業績2025年12月3日"Impact of Visual, Auditory, and Mixed Interfaces on Human-Robot Collaboration in Multi-Robot Environments", ICAT-EGVE 2025, Karlskrona, Sweden 研究業績2025年11月19日"LLM-Driven Agent-Based Evaluation Framework for Occupant-Centric HVAC Control Considering Individual Differences and Movement Behavior", BUILDSYS '25: Proceedings of the 12th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Transportation, Golden CO USA
研究業績2025年11月19日"LLM-Driven Agent-Based Evaluation Framework for Occupant-Centric HVAC Control Considering Individual Differences and Movement Behavior", BUILDSYS '25: Proceedings of the 12th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Transportation, Golden CO USA